


Chapters 1 - 13, Complete
14th Global Edition By Richard C. Dorf
Solution Manual for Modern Control Systems,



























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
Enhance your understanding of control systems with this comprehensive solution manual for Modern Control Systems, 14th Global Edition by Richard C. Dorf and Robert H. Bishop. Covering Chapters 1 through 13, this guide offers detailed, step-by-step solutions to a wide range of problems, including exercises, advanced problems, design challenges, and computer-based questions. It's an invaluable resource for students aiming to master topics such as state-space analysis, root locus techniques, frequency response methods, and digital control systems. Whether you're preparing for exams or seeking to deepen your conceptual grasp, this manual aligns seamlessly with the textbook, making it an essential companion for your studies.
Typology: Exams
1 / 35

This page cannot be seen from the preview
Don't miss anything!
2 CHAPTER 1 Introduction to Control Systems
current zworld-record zis z 236 zft). zThe zfly zlure zis zattached zto za zshort zinvisible
z leader z about z 15-ft z long, z which z is z in z turn z attached z to z a z longer z and z thicker
z Dacron z line. z The z objective z is z cast z the z fly z lure z to z a z distant z spot z with z dead-
z eye z accuracy z so z that z the z thicker z part z of z the z line z touches z the z water
z first z andzthen zthe zfly zgently zsettles zonzthe zwater zjust zas zan zinsect zmight.
E1.4 An zautofocus zcamera zcontrol zsystem:
Mind and body of the fly-fisher
cast
of
of (^) -
Exercises 3
E1.5 Tacking z a z sailboat z as z the z wind z shifts:
E1.6 An zautomated zhighway zcontrol zsystem zmerging ztwo zlanes zof ztraffic:
E1.7 z Using z the z speedometer, z the z driver z calculates z the z difference z between z the
z measured z speed z and z the z desired z speed. z The z driver zthrootle z knob z or
z the z brakes z as znecessary zto zadjust z the z speed. z If zthe zcurrent z speed z zis z znot z ztoo
z much z over z the z desired z speed, z the z driver z may z let z friction z and z gravity
z slow z the zmotorcycle zdown.
Sailor and (^) Sailboat
compass
computer steering
Active
Radar
Driver (^) Throttle or brakes
Motorcycle
Speedometer
Exercises 5
E1.11 Anzinvertedzpendulumzcontrolzsystemzusingzanzopticalzencoderztozmeasure
z the zangle zofzthe zpendulum zand za zmotor zproducing za zcontrol ztorque:
E1.12 z In zthe z video z game, zthe z player zcan z serve zas z both zthe zcontroller z and z the z sen-
z sor. zThe zobjective z of zthe z game z might z be z to z drive z a z car z along za z prescribed
z path. z The z player z controls z the z car z trajectory z using z the z joystick z using
z the z visual zqueues zfrom zthe zgame zdisplayed zonzthe zcomputer zmonitor.
Controller
6 CHAPTER 1 Introduction to Control Systems
Problems
P1.1 An zautomobile zinterior zcabin ztemperature zcontrol zsystem zblock zdiagram:
Thermostat z and z air zconditioning z unit
Automobile z cabin
Temperature
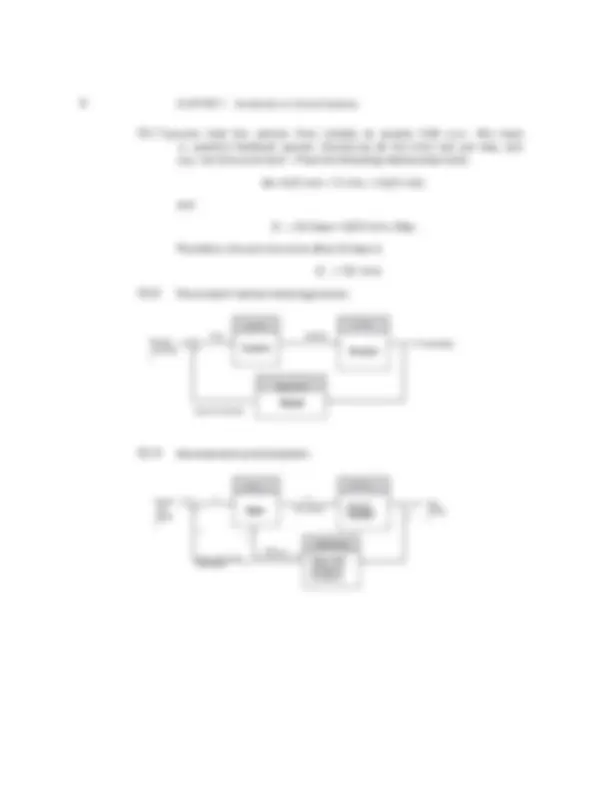
P1.2 A zhuman zoperator zcontrolled zvalve zsystem:
P1.3 A zchemical z composition zcontrol z block z diagram:
Valve
z composition analyzer
Valve
Tank
Meter
8 CHAPTER 1 Introduction to Control Systems
P1.7 zAssume z that z the z cannon z fires z initially z at z exactly z 5:00 z p.m.. z We z have
z a z positive z feedback z system. z Denote z by z ∆ t z the z time z lost z per z day, z and
z the z net^ ztime^ zerror^ zby^ z ET z.^ zThen^ zthe^ zfollwoing^ zrelationships^ zhold:
∆ tz = z 4 / 3 z min .z + z 3 z min_. z_ = z 13 / 3 z min_._
and
ET z = z 12 zdaysz×z 13 / 3 zmin ./ day z_._
Therefore, zthe znet ztime zerror zafter z 15 zdays zis
ET z z = z 52 z min_._
P1.8 The zstudent-teacher zlearning zprocess:
Teacher
Student
P1.9 Azhumanzarmzcontrolzsystem:
Arm &
Eyes and pressure
Problems 9
Fantail
P1.10 AnzaircraftzflightzpathzcontrolzsystemzusingzGPS:
Computer
z Auto-
pilot
rudder,zand z engine zpower
Aircraft Flight
System
P1.11 z The z accuracy z of z the z clock z is z dependent z upon z a z constant z flow z from
z the z orifice; z the z flow z is z dependent z upon z the z height z of z the z water z in
z the z float z tank. zThe zheight zof zthe zwater zis zcontrolled zby zthe zfloat. zThe zcontrol
zsystem z controls z only z the z height z of z the z water. z Any z errors z due z to
z enlargement z of z the zorifice zor zevaporation zof zthe zwater zin zthe zlower ztank
zis znot zaccounted z for. zThe zcontrol zsystem zcanzbe zseen zas:
Float zlevel Flowzfrom upperztank
P1.12 zAssume z that z the z turret z and z fantail z are z at z 90 ◦^ , z if z θw z /= z θF z -90◦^. z The z fantail
zoperates zon zthe zerror zsignal z θw z - z θT z , z and zas zthe z fantail zturns, zit z drives z the
z (^) turret zto zturn.
F
W
T
W z =zWind zangle F z =^ zFantail
T z =^ zTurret
W T
Problems 11
P1.16 z With z the z onset z of z a z fever, z the z body z thermostat z is z turned z up. z The
z body z adjusts z by z shivering z and z less z blood z flows z to z the z skin z surface.
z Aspirin z acts z to zlowers zthe zthermal zset-point zin zthe zbrain.
orzset-point zfrom zbody (^) -
withinzthe z body
Body
sensor
P1.17 z Hitting z a z baseball z is z arguably z one z of zthe z most zdifficult z feats z in z all z of z sports.
z Given z that z pitchers z may z throw z the z ball z at z speeds z of z 90 z mph z (or z higher!),
z batters z have z only z about z 0.1 z second z to z make z the z decision z to z swing—with
z bat z speeds z aproaching z 90 z mph. z The z key z to z hitting z a z baseball z a z long
z dis- z tance z is z to z make z contact z with z the z ball z with z a z high z bat z velocity.
z This z is z more zimportant zthan zthe zbat’s zweight, zwhich zis zusually zaround z 33
zounces z (compared zto zTy zCobb’s zbat zwhich zwas z 41 zounces!). zSince zthe
zpitcher zcan z throw z a z variety z of z pitches z (fast zball, z curve zball, z slider, zetc.), z a
zbatter zmust z decide z if z the z ball z is z going z to z enter z the z strike z zone z and z if
z possible, z decide z the ztype zof zpitch. zThe zbatter zuses zhis/her zvision zas zthe
zsensor zin zthe zfeed- z back zloop. zA zhigh zdegree zof zeye-hand zcoordination zis
zkey zto zsuccess—that z is, zanzaccurate zfeedback zcontrol zsystem.
P1.18 z z Define z the z following z variables: z p z = z output z pressure, z fs z z = z spring z force
= z Kx , z fd z = zdiaphragm z force z = z z Ap , z and z fv z z = z zvalve z force z = z z fs z z - z fd.
z The zmotion zof zthe zvalve zis zdescribed zby z y ¨ z= z fv/m z where z m z is zthe zvalve
z (^) mass. zThe zoutput zpressure zis zproportional zto zthe zvalve zdisplacement, zthus
z pz =z cyz,z wherez cz iszthezconstantzofzproportionality.
Screw
z displacemen
t
x ( t )
Spring
f s f v
K
position
y
Constantzof
c
Output z pressur e p ( t )
area
f d
A
12 CHAPTER 1 Introduction to Control Systems
P1.19 A zcontrol z system zto z keep z a zcar zat z a zgiven z relative z position z offset zfrom za
z lead zcar:
car
car
Position -
Actuator u^ z z Controller
P1.20 A zcontrol z system z for z a z high-performance z car z with z an z adjustable z wing:
P1.21 Azcontrolzsystemzforzaztwin-liftzhelicopterzsystem:
z distance Radar
Pilot
Helicopter
Altimeter
Computer (^) wing
Tire internal
14 CHAPTER 1 Introduction to Control Systems
P1.25 A zfeedback zcontrol zsystem zfor zthe zspace ztraffic zcontrol:
Control z law
Reaction
z forces Satellite
P1.26 Earth-based zcontrol zof za z microrover z to zpoint zthe zcamera:
Camera z Positio n
P1.27 Control z of za z methanol z fuel zcell:
G(s) Gc(s)
Gc(s) G(s)
H(s)
Advanced z z Problems 15
Advanced Problems
AP1.1 Control z of z a z robotic z microsurgical z device:
AP1.2 An zadvanced zwind zenergy zsystem zviewed zas za zmechatronic zsystem:
AP1.3 z The z automatic z parallel z parking z system z might z use z multiple z ultrasound
z sensors z to z measure z distances z to z the z parked z automobiles z and z the
z curb. z The zsensor zmeasurements zwould zbe zprocessed zby zan zon-board
zcomputer z to z determine z the z steering z wheel, z accelerator, z and z brake
z inputs z to z avoid z collision zand zto zproperly zalign zthe zvehicle zin zthe zdesired
zspace.
Physical System Modeling POWER^ GENERATION^ AND^ STORAGE
Sensors and Actuators
WIND ENERGY (^) Signals and Systems SYSTEM
Software and Data Acquisition
Computers and Logic Systems
Gc(s) G(s)
H(s)
End-effector -
Design Problems 17
Design Problems
CDP1.1 The zmachine z tool z with z the z movable z table z in z a z feedback z control z configu-
z ration:
DP1.1 Use zthe zstereo zsystem zandzamplifiers zto zcancel zout zthe znoise zby zemitting
z signals z 180 ◦^ z z^ out zof zphase zwith zthe znoise.
Machine z tool zwith z table
Microphone
DP1.2 An zautomobile zcruise zcontrol zsystem:
1/ K motor Valve^
Automobile engine
K
sensor
Amplifier motor
Machine tool with table
sensor
18 CHAPTER 1 Introduction to Control Systems
DP1.3 An z automoted z cow z milking z system:
DP1.4 A zfeedback zcontrol zsystem z for za zrobot zwelder:
and
Motorzand z arm
Measured z zposition camera
DP1.5 A zcontrol zsystem zfor zone zwheel zof za ztraction zcontrol zsystem:
Motor and gears
Robot arm and cup gripper
Cow and milker
Wheel
Antislip
1/ R w
Vehicle
Antiskid