

Numerical Modeling in
Biomedical Systems
BME 125:305
Lecture 10
10/8/19

























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
lecture 10 to be used for the purpose of studying
Typology: Lecture notes
1 / 33

This page cannot be seen from the preview
Don't miss anything!
Newton- Cotes
Finite difference methods
Spline interpolation
Newton’s polynomials
Errors in FD methods
Simpson’s rules
-5 1 2 3 4 5 6 7 8
0
5
10
15
20
x
y
7th order polynomial
x = [1 2 3 4 5 6 7 8]; y = [4 7 5 3 8 0 3 2 ];
Example: 7th^ order polynomial fit to 8 data points
f x a 1 x^2 a 2 xa 3 Careful – descending powers!
polyfit returns the coefficients p 1 , p 2 ,… in vector “p”. Function polyval takes
these coefficients along with a set of x values (xi) and calculates the polynomial f (x)
xi = [1:0.1:8]; yii = polyval(p,xi);
figure; plot(x,y,'ro',xi,yii); xlabel('x'); ylabel('y'); title('7th order polynomial');
p = polyfit(x,y,7);
20000 2002 2004 2006 2008 2010 2012
20
40
60
80
100
x
f(x)
Shifted fit
20000 2002 2004 2006 2008 2010 2012
20
40
60
80
100
x
f(x)
Raw fit - Large x-values
figure; plot(x,y,'ro',xi,yi); xlim([2000 2012]); ylim([0 100]); xlabel('x'); ylabel('f(x)'); title('Raw fit - Large x-values');
x = [2001 2002 2003 2004 2005 2006 2007 2009 2010 2011]; xi = x-2006; y = [18 28 23 28 26 24 50 28 36 39];
Shifting Data for Polynomial Fitting
(See note on Canvas > Resources > Supplementary Materials for an explanation of why polyfit can experience problems fitting high order polynomials to large x-values)
x = [2001 2002 2003 2004 2005 2006 2007 2009 2010 2011]; y = [18 28 23 28 26 24 50 28 36 39]; p = polyfit(x,y,9); xi = [2001:0.1:2011]; yi = polyval(p,xi); figure; plot(x,y,'ro',xi+2006,yi); xlim([2000 2012]); ylim([0 100]); xlabel('x'); ylabel('f(x)'); title('Shifted fit');
p = polyfit(xi,y,9); xi = [-5:0.1:5]; yi = polyval(p,xi);
Equivalent to interp1(x,Y,xi,’spline’)
-5 0 2 4 6 8
0
5
10
15
20
x
y
Cubic Spline
-5 0 2 4 6 8
0
5
10
15
20
x
y
7th order polynomial
Newton- Cotes
Finite difference methods
Spline interpolation
Newton’s polynomials
Errors in FD methods
Simpson’s rules
x
f (x)
a (^) b
n
h ba
1 2 3 … (^) n
h
b
a
n
b
a
I f x f x f (^) n x a 0 a 1 xa 2 x^2 anx^ n
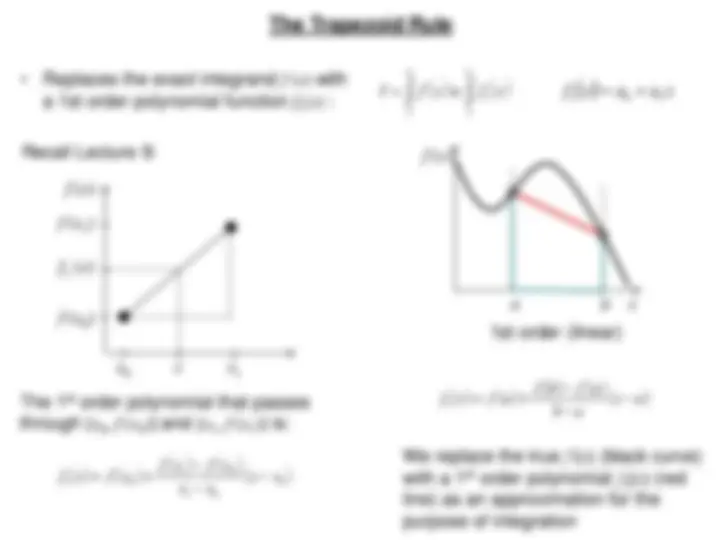
Replace the original integrand with an nth^ order polynomial function:
x
f (x)
a (^) b Zero-order polynomial (constant)
x
f (x)
a (^) b 1st-order polynomial (linear)
x
f (x)
a (^) b 2nd-order polynomial (quadratic)
^
b
a
b
a
I f x f 1 x f 1 x a 0 a 1 x
Recall Lecture 9:
x 0 x x 1
f (x)
f (x 1 )
f 1 (x)
f (x 0 )
1 0
1 0 (^1 0) x x x x
f x f x f x f x
The 1st^ order polynomial that passes through [x 0 , f (x 0 )] and [x 1 , f (x 1 )] is:
x
f (x)
a (^) b 1st-order (linear)
b a
f x f a f b f a
1
We replace the true f ( x ) (black curve) with a 1st^ order polynomial f 1 ( x ) (red line) as an approximation for the purpose of integration
x
f (x)
a b 1st-order (linear)
b
a
b
a
I f x f 1 x
b a
f b f a I f a
b
a
(^)
b a
f b f a f x f a
1
2
I ba f a f^ b
The trapezoid rule:
f (a)
f (b)
from a = 0 to b = 0.
(^00) 0.2 0.4 0.6 0.8 1
1
2
3
4
x
y = f(x)
(^00) 0.2 0.4 0.6 0.
1
2
3
4
x
y = f(x)
1.640533 (exact)
… a true relative error of 89.5%
2
I h f a f b
(^00) 0.2 0.4 0.6 0.8 1
1
2
3
4
x
y = f(x)
Using the Trapezoid rule gives
Trapezoid rule:
3 2
Oh f a f b I h The error associated with using the Trapezoid rule is O(h^3 ):
(^00) 0.2 0.4 0.6 0.8 1
1
2
3
4
x
y = f(x) h = 0.
(^00) 0.2 0.4 0.6 0.8 1
1
2
3
4
x
y = f(x)
h = 0.
We can break down the interval from a to b into multiple smaller sections, each with smaller h, applying the Trapezoid rule to each section and summing the individual areas:
(^00) 0.2 0.4 0.6 0.8 1
1
2
3
4
x
y = f(x)^ h^ = 0.^
This is the “multiple application” or Composite Trapezoid Rule
Can we develop more efficient numerical integration algorithms with errors that reduce more quickly as the number of segments (n) increases?
^
b
a
n
b
a
I f x f x f (^) n x a 0 a 1 xa 2 x^2 anx^ n Use higher order polynomial functions to approximate f (x):
x
f (x)
a b
1st-order (linear)
Trapezoid rule
x
f (x)
a (^) b
2nd-order (quadratic)
Simpson’s 1/3 rule
x
f (x)
a (^) b
3rd-order (cubic)
Simpson’s 3/8 rule
b
a
b
a
I f x f 2 x f 2 x a 0 a 1 xa 2 x^2
^0 ^4 ^1 ^ ^2 3
f x f x f x h I 2
b a h
This can be integrated and simplified to: (^) where
“1/3 rule”
If we know the value of f (x) at x = a, b, and midway between a and b, ( data points) we can use Simpson’s 1/3 rule
x
f (x)
a = x 0 b = x 2
2 2
0 0
2 0 1 0 2 0 1
x x
x x
I (^) f x (^) b b x x b x x x x dx
x 1