Download General Aerospace Shell Beam Structures-Material and Structures-Lecture Handout and more Exercises Structures and Materials in PDF only on Docsity!
beams. However, in the general case a beam is subjected to:Thus far, we have concentrated on the bending of shell
- torque (torsional moments), • shear forces, S • bending moments, M• axial load, F
T
Figure 15.
Examples of general aerospace shell beam structures
Aircraft Wing
Space Habitat Shell
connecting nodes
Idealize the cross-section of the shell beam into two parts:
Parts that carry extensional stress,
σ
xx
(and thus the bending and
axial loads)
Parts that carry shear stress
σ
xs
(and thus the shear loads and
torques)
Two
examples
again…
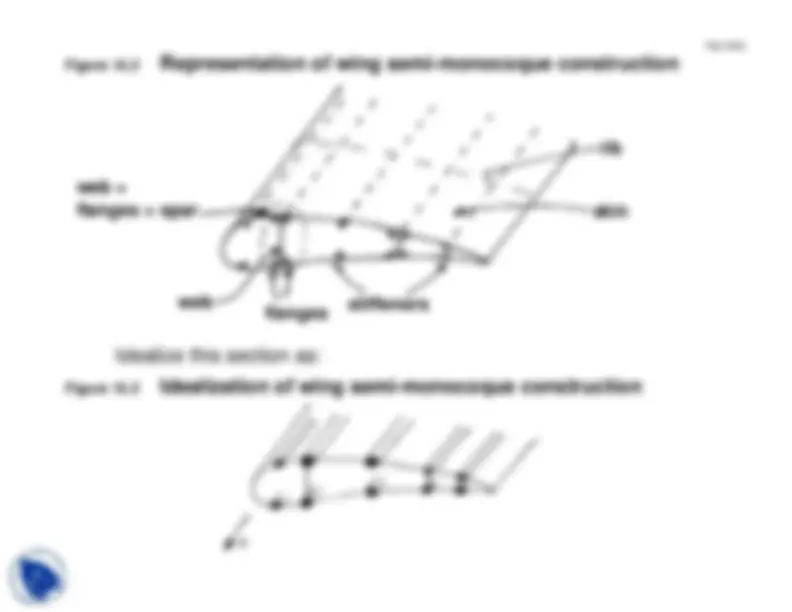
high aspect ratio wing with
semi-monocoque
construction
Notes
monocoque
construction
- all in one piece without internal framing
- from French “coque” meaning “eggshell”
semi-monocoque
- stressed skin construction
with
internal framework
- still have “eggshell” to carry shear stresses,
σ
xs
- internal framework to carry axial stress,
σ
xx
Skins and webs are assumed to carry
only
shear stress
σ
xs
Flanges and stringers are assumed to carry
only
axial
stress
σ
xx
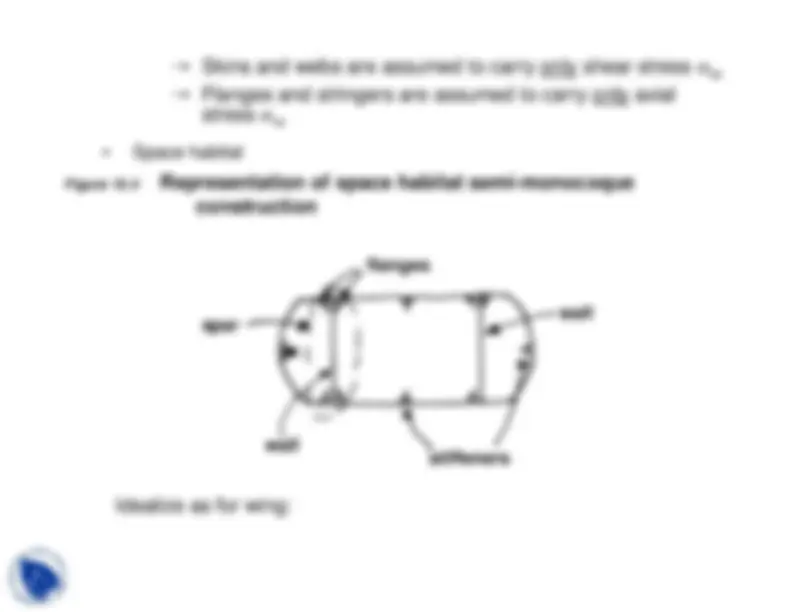
Space habitat
Figure 15.
Representation of space habitat semi-monocoque
construction
wall
wall
stiffeners
spar
flanges
Idealize as for wing:
Figure 15.
Idealization of space habitat semi-monocoque construction
Outer skin and walls are assumed to carry
only
shear stress
σ
xs
Flanges and stiffeners are assumed to carry
only
axial stress
σ
xx
and torsion. Utilize St. Venant assumptions: Analyze these cross-sections as a beam under combined bending, shear,
do such)of the cross-section (or enough stiffness in the internal bracing toThere are enough closely spaced rigid ribs to preserve the shape
The cross-sections are free to warp out-of-plane
Start to develop the basic equations by looking at the most basic case:
leave at zero for now The axial stress is due only to bending (and axial force if that exists --
) and is therefore independent of the twisting since the
* Find M, S,wing is free to warp (except near root -- St. Venant assumptions)
T
from statics at any cross-section x of the beam
Figure 15.7 Consider the cross-section:
Representation of cross-section of box beam
flange/stiffener i = A Area associated with
i
Find the modulus-weighted centroid (
Note
: flange/stiffeners may be
made from different materials)
use a “corner” of the beam)Choose some axis system y, z (convenience says one might
Find the modulus-weighted centroid location:
∑
A
y i
i
y
∑
A
i
∑
A
z i
i
z
∑
A
i
n
∑
= sum over number of flanges/stiffeners)
i
1
number = n
Note
: If flanges/stiffeners are made of the
same material, remove the asterisks)
- Find the moments of inertia with reference to the coordinate
system with origin at the modulus-weighted centroid
2
I y = ∑ A i z i
2
I
z
∑
A
i
y i
I
yz
= ∑ A i y i z i
Fall, 2002
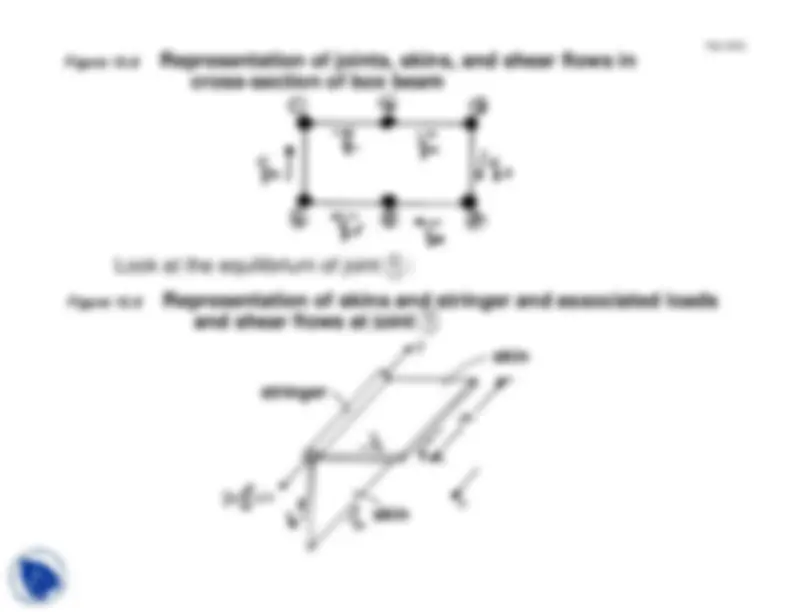
Figure 15.
Representation of joints, skins, and shear flows in
cross-section of box beam
Figure 15.
Look at the equilibrium of joint 1
Representation of skins and stringer and associated loads
and shear flows at joint
stringer
skin
skin
Notes
The stringer only carries axial load
The skin carries only shear flow
( cross-section cut). This is due to equilibrium“cut”) must be the same as at the edge (theThe shear flow at the “end” of the skin (where it is σ
xy
σ
yx
)
Apply equilibrium:
∑
F
x
dP
⇒ − P + P +
dx
q 1 dx
q 6 dx
dx dP
⇒ q 1 − q 6 = −
dx
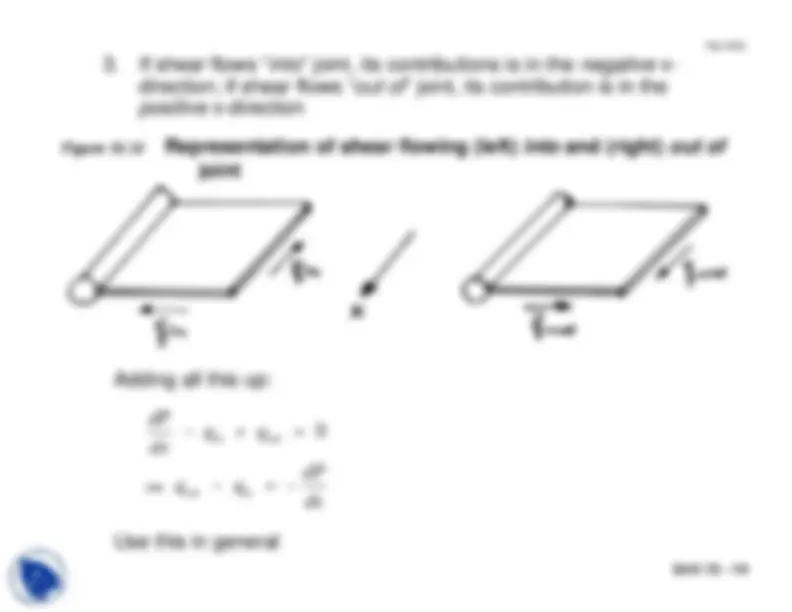
More generally note that:
Fall, 2002
If shear flows “
into
” joint, its contributions is in the
negative
x-
direction; if shear flows “
out of
” joint, its contribution is in the
positive
x-direction
Figure 15.
Representation of shear flowing (left)
into
and (right)
out of
joint
Adding all this up:
dP
q in
q out
dx
dP
q out
q in
dx
Use this in general
Unit 15 - 14
Fall, 2002
For a more complicated joint, use superposition
Figure 15.
Representation of joint with multiple skins
--> Need an expression for P -- start with:
P
A
xx^
differentiating:
d P
A
d
xx^
d A
xx
d x
d x
d x = 0
since are considering stringers
with a uniform cross-section
Most general case
q
out
q
in
A
d
xx^
Joint Equilibrium
d x
Q S
q
out
−
q
in
=
y
z
Symmetric section
I y
M
z
= 0
Shear stresses arise due to two reasons: Now have an equation for the equilibrium of shear stresses at the joints.
Shear resultant
Twisting
It is convenient to break up the problem into two separate problems:In general have at any cross-section:
Unit 15 - 17
(1) “Pure Shear”
(2) “Pure Twist”
there is no twisting at shear center so shear resultant acts
superposition)--> Solve each problem separately, then add the results (use
Condition
: The two force systems (S
z ,
T
and S
z ’ ,
T
’ ) must be
equipollent
Figure 15.
Demonstration of equipollence of force systems
Fall, 2002
Solution procedure
Given:
section properties
loading [T(x), S
z (x)]
Find:
shear stresses (flows)
(n joints)
shear center
(n + 1) variables
Consider
Pure Shear
case
a) Apply joint equilibrium equation at each joint
Note
: n joints will yield n-
independent
section is closed) equations. (one is dependent since the
b) Use Torque Boundary Condition
T
internal
T
applied
This is torque
equivalence
not
equilibrium
Do this about the line of action of S
z
Then:
T
applied
S
z
d
T
internal
q i ( moment arm
i ( skin length
i
c)
Specified no twist (Pure Shear Case), so apply the
No
Twist Condition
Recall from Torsion Theory:
ds
AG
d
d x
d
α
Here:
d x
and:
t q
q
ds
t