Download Frequency Response Analysis - Process Control - Lecture Slides and more Slides Process Control in PDF only on Docsity!
Control System Design Based on
Frequency Response Analysis
Frequency response concepts and techniques play an important role in control system design and analysis.
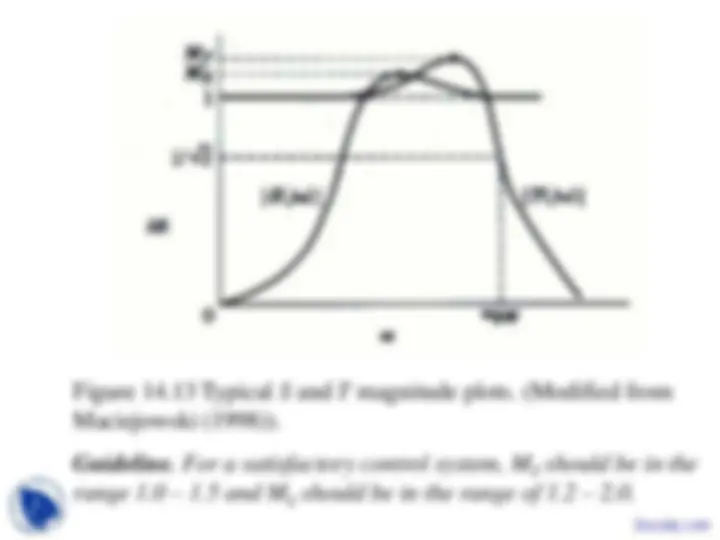
Closed-Loop Behavior
In general, a feedback control system should satisfy the following design objectives:
- Closed-loop stability
- Good disturbance rejection (without excessive control action)
- Fast set-point tracking (without excessive control action)
- A satisfactory degree of robustness to process variations and model uncertainty
- Low sensitivity to measurement noise Docsity.com
Chapter 14
Controller Design Using Frequency Response Criteria Advantages of FR Analysis:
- Applicable to dynamic model of any order (including non-polynomials).
- Designer can specify desired closed-loop response characteristics.
- Information on stability and sensitivity/robustness is provided. Disadvantage: The approach tends to be iterative and hence time- consuming -- interactive computer graphics desirable (MATLAB)
Chapter 14
( )
( ) ( )( ) ( )
( ) ( ) ( ) ( )
( )
1 2 1 1 2 1 1 2 1
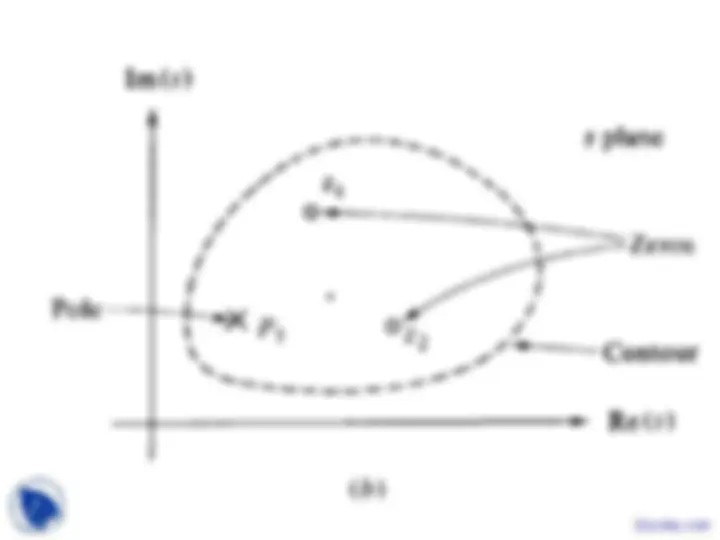
will increase by 2 clockwise from each zero
inside the contour, but decrease by 2 for eac
Comformal Mapping
h pole
inside the c
s z s z
F s
s p
F s z s z s p
F s
s F
s z s z s
F s
s
p
π π
ontour,
⇒ (2 -1) encirclements
Dynamic Behavior of Closed- Loop Control Systems
Chapter 11
(^) 4-20 mA
Application of Z-P=N Theorem to
Stability
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
(1) Consider the characteristic equation of the closed-loop
control system:
(2) Let 1 1 , where
and.
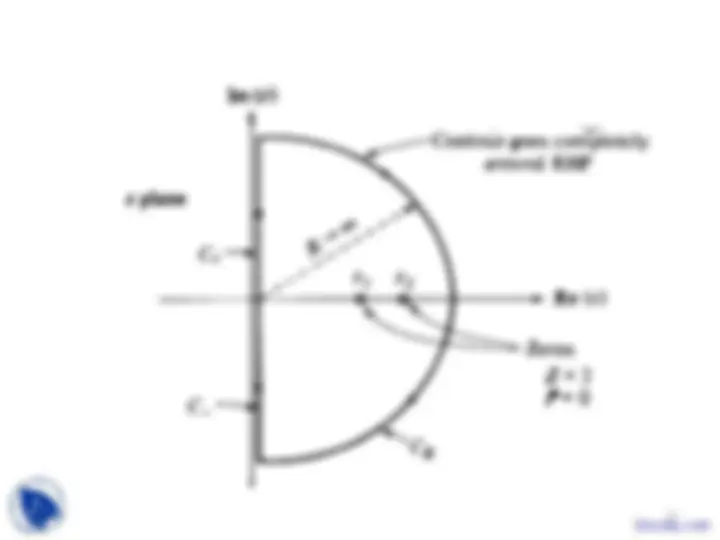
(3) Select a contou
OL c v p m OL M c M v p m
G s G s G s G s G s
F s G s B s G s
B s G s G s G s G s G s
( )
r that goes completely around the entire
right-half of -plane.
(4) Plot and determine -.
s
F s N = Z P
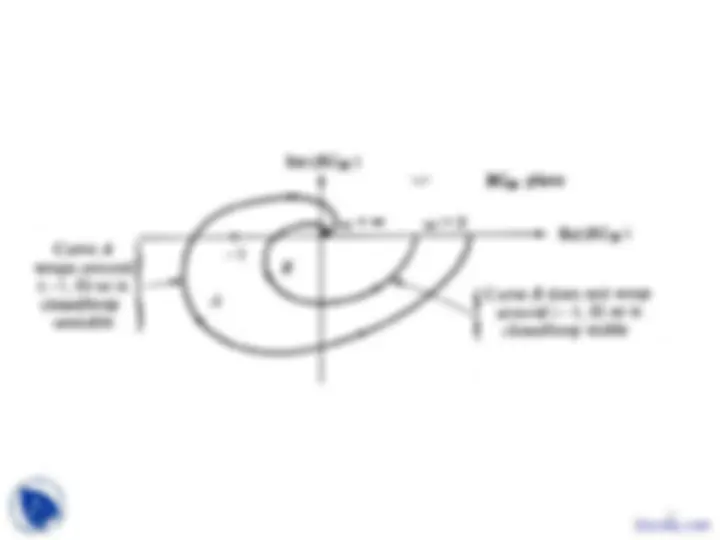
Nyquist Stability Criterion
( )
If is the number of times the Nyquist plot encircles the point ( 1, 0) in the complex plane in the clockwise direction, and is the number of open-loop poles of that lie
in the RHP, then
OL
N
P G s Z N P
−
= + ( )
is the number of unstable roots of 1 + GOL s = 0.
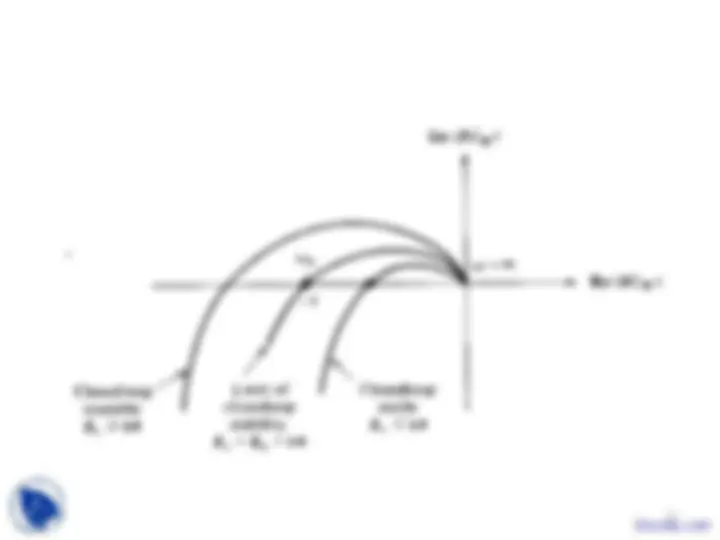
Example
3
3
/ 8 1 0
- contour: and 0 / 8 1 0 / 8 0 0 270
OL^ c
OL c
OL c OL OL OL
G s K s P
C s j G j K j G K G j G G j
=
∴ =
= < < ∞
= = ∠ = → ∞ → ∠ → −
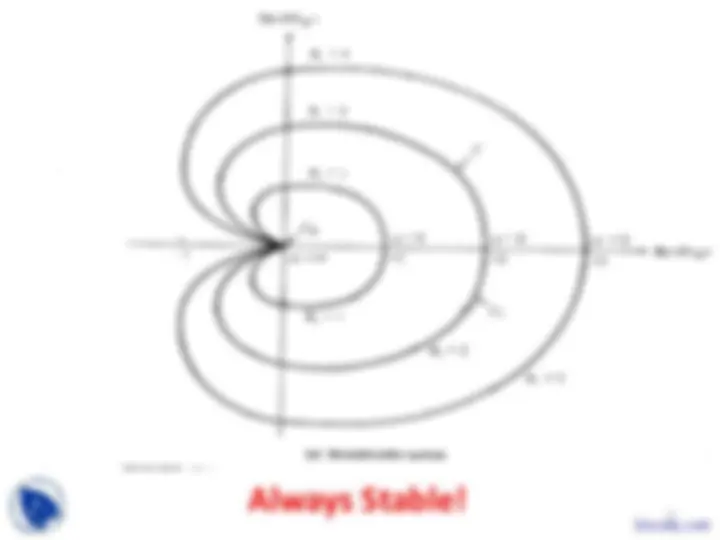
Important Conclusion
The C+ contour, i.e., Nyquist plot,
is the only one we need to
determine the system stability!
Ultimate Gain and Ultimate
Frequency
( )
( ) (^) ( ) ( ) ( )
( ) (^) ( ) ( ) ( ) ( ) (^) ( ) ( ) ( ) ( ) (^) ( ) ( ) ( )
3 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
OL^ c s j c c
c cu c u
G j j K
s s s
K K
j
K
K
K
ω
ω
ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω
=
= − + = ^
Example 2
( ) (^) ( )( )
( ) ( )
( ) ( ) ( )
( ) (^) ( )( )
2 (^2 2 2 2 2 )
2 2
1 5 1 0
(a) contour: (^1 5 ) (^1 5 6 1 5 36 1 5 )
(b) contour:
lim lim 1 5 1 lim 5 0
(c) contour: cojugate of.
OL^ c
OL c^ c c
R OL j^ j c^ j c j R R R
G s K P s s
C
G j K^ K j K j C G R e K^ K e R e R e R C C
φ φ φ φ
− →∞ →∞ →∞ − +
= (^) + + ⇒ =
= = − − − + (^) − + − +
⋅ = (^) ⋅ + ⋅ + ≈ →